AAPG GEO 2010 Middle East
Geoscience Conference & Exhibition
Innovative Geoscience Solutions – Meeting Hydrocarbon Demand in Changing Times
March 7-10, 2010 – Manama, Bahrain
3D Localized ![]() Prestack
Prestack![]() Depth Migration from Workstations
Depth Migration from Workstations
(1) Nexus Geosciences Inc., Sugar Land, TX.
Summary
We have recently developed a localized ![]() prestack
prestack![]() depth migration workflow based on proprietary technology that is equivalent to Gaussian Beam migration. This workflow enables the 3D
depth migration workflow based on proprietary technology that is equivalent to Gaussian Beam migration. This workflow enables the 3D ![]() prestack
prestack![]() seismic depth imaging of a target volume within a few hours or even minutes. The work flow can be performed on a single workstation or a cluster of compute nodes, and the quality of the results is very good, consistently better than Kirchhoff, WEM, and beam migrations. In contrast to conventional workflows that typically require weeks or even months for an updated
seismic depth imaging of a target volume within a few hours or even minutes. The work flow can be performed on a single workstation or a cluster of compute nodes, and the quality of the results is very good, consistently better than Kirchhoff, WEM, and beam migrations. In contrast to conventional workflows that typically require weeks or even months for an updated ![]() prestack
prestack![]() seismic depth migration volume to be produced, the new toolkit provides a near real-time solution to
seismic depth migration volume to be produced, the new toolkit provides a near real-time solution to ![]() prestack
prestack![]() depth imaging. The migration works for both isotropic and anisotropic velocity models (VTI and TTI), and handles data acquired with narrow or wide azimuth acquisition geometries. Real data examples are presented here to demonstrate the new workflow.
depth imaging. The migration works for both isotropic and anisotropic velocity models (VTI and TTI), and handles data acquired with narrow or wide azimuth acquisition geometries. Real data examples are presented here to demonstrate the new workflow.
Introduction
3D ![]() prestack
prestack![]() seismic depth migration (PSDM) is an extremely computationally intensive process, taking weeks or even months to complete, depending on the type of migration and survey size. Although deemed as the most accurate, PSDM is by far the slowest of all the methods used for imaging complex geology. By contrast, our innovative localized
seismic depth migration (PSDM) is an extremely computationally intensive process, taking weeks or even months to complete, depending on the type of migration and survey size. Although deemed as the most accurate, PSDM is by far the slowest of all the methods used for imaging complex geology. By contrast, our innovative localized ![]() prestack
prestack![]() depth migration workflow significantly reduces the time taken in such processes. We typically apply this localized PSDM approach to a restricted region (volume of interest or VOI): for a targeted study or experimental QC of different velocity models, it is desirable to image only a small VOI using user selected models, resulting in image updates within a very short time period (minutes to a few hours).
depth migration workflow significantly reduces the time taken in such processes. We typically apply this localized PSDM approach to a restricted region (volume of interest or VOI): for a targeted study or experimental QC of different velocity models, it is desirable to image only a small VOI using user selected models, resulting in image updates within a very short time period (minutes to a few hours).
The localized PSDM workflow uses the entire range of the input seismic data, as it would be used in a full volume migration process. There is no short cut in migration aperture. The marked improvement in speed of processing comes from the “link” between a piece of the output image to a piece of the input data. This link is established during the ![]() prestack
prestack![]() depth migration processing step which decomposes the data into Gaussian Packets using our proprietary diplet decomposition technology (Peng 2006). Coupled with the rapid velocity building and updating tools, this localized
depth migration processing step which decomposes the data into Gaussian Packets using our proprietary diplet decomposition technology (Peng 2006). Coupled with the rapid velocity building and updating tools, this localized ![]() prestack
prestack![]() depth migration workflow delivers a new depth image with dense migration gathers in a near real-time fashion.
depth migration workflow delivers a new depth image with dense migration gathers in a near real-time fashion.
Processing techniques and results
The localized seismic imaging uses the recently developed Gaussian beam equivalent migration and de-migration technique (Peng and Sheng, 2009 SEG). To focus on a small volume of interest (VOI), we integrate the migration and de-migration modules with the geomodeling software package GOCAD® (a Paradigm™ product) and our ![]() Prestack
Prestack![]() Interpretation plug-in, establishing a user-interactive workflow to perform the localized imaging tasks. The workflow allows the user to select input data from the entire data set to focus on a small targeted area (VOI). Then, by rapidly migrating and synthesizing the selected data within the VOI, the user can quickly assess the imaging sensitivity to model variations within the selected region. The local image data can be flexibly spliced into the original image volume to create a full volume for viewing and manipulation, allowing for an easy assessment of the image sensitivity and validity of the model. It should be noted that the local splice volume is a virtual data entity in that it does not create another physical data set on the disk. Instead two volumes are only logically combined to form a virtual data set that has nevertheless the same look and feel to the user. We use the following real data examples to demonstrate the target-oriented localized migration process and results.
Interpretation plug-in, establishing a user-interactive workflow to perform the localized imaging tasks. The workflow allows the user to select input data from the entire data set to focus on a small targeted area (VOI). Then, by rapidly migrating and synthesizing the selected data within the VOI, the user can quickly assess the imaging sensitivity to model variations within the selected region. The local image data can be flexibly spliced into the original image volume to create a full volume for viewing and manipulation, allowing for an easy assessment of the image sensitivity and validity of the model. It should be noted that the local splice volume is a virtual data entity in that it does not create another physical data set on the disk. Instead two volumes are only logically combined to form a virtual data set that has nevertheless the same look and feel to the user. We use the following real data examples to demonstrate the target-oriented localized migration process and results.
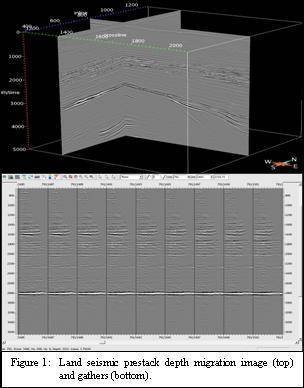
Figure 1 displays a land seismic data image volume and a few common image (offset) gathers using an initial (tomographic) velocity model. The target zone is below the strong unconformity horizon at around 3500 meters in depth. The data set is used to demonstrate the process of the localized ![]() prestack
prestack![]() depth migration and its advantages. For illustration purposes, the velocity field above the target zone was manually modified to include a low velocity
depth migration and its advantages. For illustration purposes, the velocity field above the target zone was manually modified to include a low velocity ![]() layer
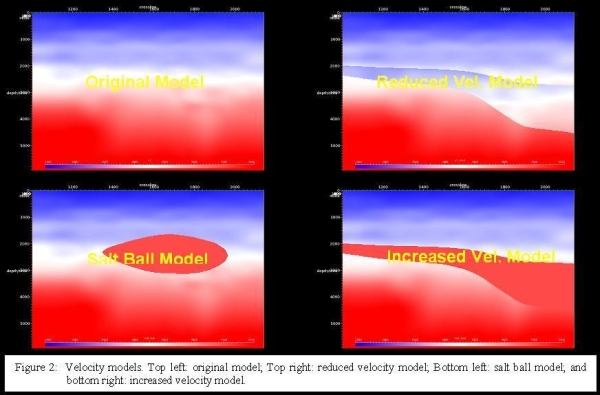
layer![]() , a high velocity
, a high velocity ![]() layer
layer![]() , and a very high velocity salt body. As seen in Figure 2, the original and modified velocity models are displayed at the same inline location. A small cube of about 50 square kilometers and 1.5 kilometers in depth was chosen in and around the velocity change areas. Localized
, and a very high velocity salt body. As seen in Figure 2, the original and modified velocity models are displayed at the same inline location. A small cube of about 50 square kilometers and 1.5 kilometers in depth was chosen in and around the velocity change areas. Localized ![]() prestack
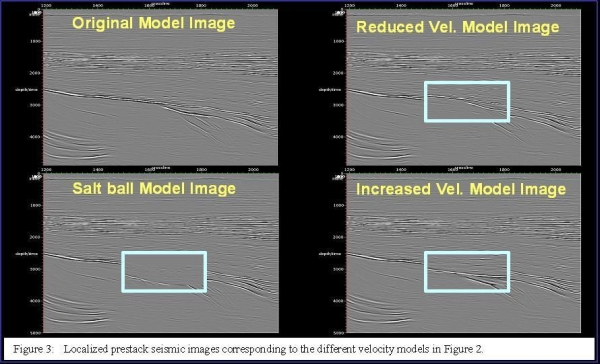
prestack![]() depth migration was run on all these 4 velocity models and the results are shown in Figure 3. The inline section of the small cube frame (VOI, displayed in this figure as the light blue rectangles) was spliced into the full volume image for better visualization and interpretation. The localized
depth migration was run on all these 4 velocity models and the results are shown in Figure 3. The inline section of the small cube frame (VOI, displayed in this figure as the light blue rectangles) was spliced into the full volume image for better visualization and interpretation. The localized ![]() prestack
prestack![]() depth migration was performed only within the VOI, although the entire volume of the unmigrated seismic data and full size velocity model were used as input. As a result, the depth image within the VOI was quickly obtained to assess the correctness of the trial velocity models. In this figure, one can see clearly that the lower overburden velocity pulls the major horizon up, while the higher velocities above the target zone significantly pushes the horizon down, and the salt body model almost pushes the unconformity horizon out of the bottom of the VOI. The VOI size is equivalent to about 2 GOM OCS blocks (46 km2) and the imaging grids are very dense (12.5 m x 12.5 m x 5 m). In terms of processing time, it took about 25 minutes to get the localized
depth migration was performed only within the VOI, although the entire volume of the unmigrated seismic data and full size velocity model were used as input. As a result, the depth image within the VOI was quickly obtained to assess the correctness of the trial velocity models. In this figure, one can see clearly that the lower overburden velocity pulls the major horizon up, while the higher velocities above the target zone significantly pushes the horizon down, and the salt body model almost pushes the unconformity horizon out of the bottom of the VOI. The VOI size is equivalent to about 2 GOM OCS blocks (46 km2) and the imaging grids are very dense (12.5 m x 12.5 m x 5 m). In terms of processing time, it took about 25 minutes to get the localized ![]() prestack
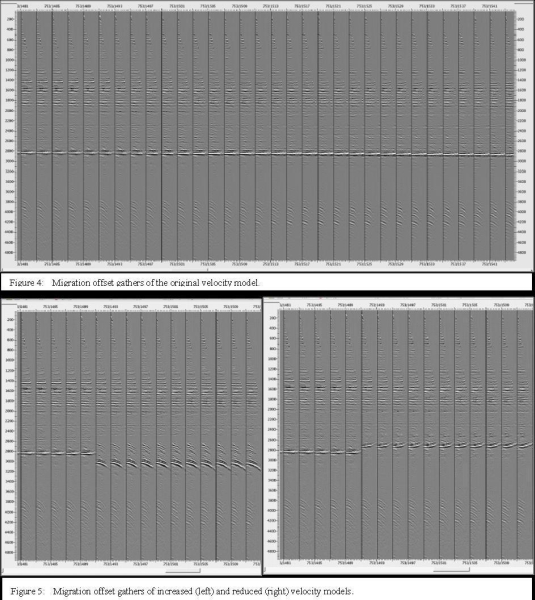
prestack![]() depth image (with dense gather output) on an 8-CPU workstation. Figures 4 and 5 show the original image gathers and new image gathers with modified velocity models, respectively.
depth image (with dense gather output) on an 8-CPU workstation. Figures 4 and 5 show the original image gathers and new image gathers with modified velocity models, respectively.
The fast performance of the localized depth migration thus allows for quick assessment of the seismic velocity model before launching a full scale depth migration processing job. The application of this localized seismic imaging workflow would essentially benefit any circumstance where seismic images need to be quickly updated to accommodate new information. For example during the drilling of a well where drilling surprises could be promptly handled or velocity model updating quickly evaluated to mitigate the risk posed by the new information.
Conclusions
The localized ![]() prestack
prestack![]() depth migration technology and the accompanying processing workflow permit near real time seismic imaging in a local volume of interest (VOI) for a given velocity model. The
depth migration technology and the accompanying processing workflow permit near real time seismic imaging in a local volume of interest (VOI) for a given velocity model. The ![]() prestack
prestack![]() depth imaging can be run on a high-end workstation or a cluster of compute nodes within a matter of minutes. The fast performance of the imaging processing allows for rapid velocity model iteration. The localized image can easily be spliced into an existing seismic image volume for quick comparison and interpretation. The common image gathers can also be spliced into the existing data for gather analysis and
depth imaging can be run on a high-end workstation or a cluster of compute nodes within a matter of minutes. The fast performance of the imaging processing allows for rapid velocity model iteration. The localized image can easily be spliced into an existing seismic image volume for quick comparison and interpretation. The common image gathers can also be spliced into the existing data for gather analysis and ![]() prestack
prestack![]() seismic interpretation. Several applications exist for this fast and accurate targeted imaging capability, including localized
seismic interpretation. Several applications exist for this fast and accurate targeted imaging capability, including localized ![]() prestack
prestack![]() depth migration for imaging-while-drilling where real time measurements can be quickly integrated into the seismic volume for rapid and effective decision making.
depth migration for imaging-while-drilling where real time measurements can be quickly integrated into the seismic volume for rapid and effective decision making.
Acknowledgements
The authors would like to thank NGI for allowing the publication of this work.